2026-02-14 02:14:20|kindsoft |来源:kindsoft
全球Robotaxi领域的竞争一触即发,不带方向盘与踏板的特斯拉Cybercab,终于即将迈入量产阶段,近期已有不少网友拍到它正处于最后的路测环节。
而且眼尖的网友还发现,不仅车屁股上加装了摄像头清洁,车身连后视镜都没了。
好家伙,特斯拉这个Robotaxi的终极形态,看来也是跟随了马斯克的风格,一点后路都不打算留了。
不过另一边,Waymo前任CEO,对着特斯拉路线仍是激情炮轰:特斯拉FSD?跟重度近视没区别。
Cybercab路测曝光:无后视镜,加装摄像头清洁
带着标志性金色车身的特斯拉Cybercab,悄悄在北美上路测试了。
有意思的是,最近网友记录的照片中,传递出了一些新的细节。
先是有人拍到,一辆位于美国得州奥斯汀的Cybercab原型车,正在进行夜间路测。
尽管光线昏暗,不过还是能发现,这辆车没有配备外侧后视镜。也就是说,车辆只依靠翼子板上的摄像头来获取视野。

这还是Cybercab首次被发现,在没有后视镜的情况下测试。
在此之前,Cybercab测试车其实已多次现身得州,只是为了遵守当地法规以及联邦机动车辆安全标准(FMVSS),每辆测试车都“老老实实”地装有方向盘、踏板和后视镜。
现在被拍到的Cybercab,看上去和官方渲染图更加接近,可能下一步就是真的要取消方向盘了。

当然,安全起见,这辆车内仍配有临时的人工操控装置,车内也有安全员随时准备接管。
另一辆在美国伊利诺伊州芝加哥的路测车,也被网友发现了“不得了”的小细节。
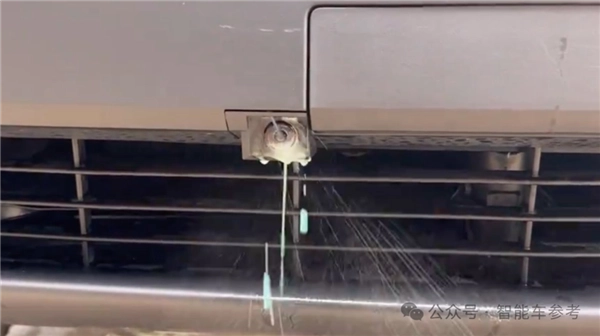
此时正值冬季的芝加哥,多雪且有风,比奥斯汀的环境寒冷、泥泞得多。在这里测试的Cybercab,被拍到时也是满身污垢——除了车尾摄像头区域。

图片中可以看到,车辆后置摄像头周围区域比较干净,后备箱盖上还有明显的水渍。
这不由得让人联想到,特斯拉为前置保险杠摄像头配备的清洁方案,原理也是向镜头上喷水冲走污垢,然后借助风力把水分吹走。
只不过特斯拉这个前置摄像头自清洁,一开始只出现在Cybertruck车型上,去年Model Y焕新的时候才加装了这个功能。
所以外界猜测,特斯拉很有可能是在Cybercab上,配备了后置摄像头清洁装置。
对于摄像头自动清洗装置,特斯拉车主们呼吁已久。
原因自然不难理解,特斯拉是纯视觉路线的头号“推行大使”,和Waymo等玩家的融合感知派不同。
特斯拉遵循“第一性原理”的思路,不依赖激光雷达这类设备来获取环境信息,而是着重依靠光学摄像头,通过模拟人类驾驶员的视觉感知方式,来完成对周围世界的解析、车道线的识别、障碍物的检测以及交通导航等一系列功能。
这种情况下,如果摄像头被泥点、融雪等污渍阻挡,相当于人类驾驶员的视线受限,特斯拉FSD接收的数据就有可能会受到影响。

在配备方向盘与踏板的特斯拉车辆上,当系统面临这类复杂状况时,人类能够随时介入接管。然而,专门为Robotaxi设计的Cybercab,未来将不会安装方向盘和踏板,乘客无法对其进行接管操作。
因此,无需人类干预,能自我诊断视线问题并立即纠正、保证摄像头的洁净,也是Cybercab大规模上路前必备的能力。
那在其他车型上,特斯拉想同样实现完全无人驾驶,是不是意味着,之后也要加装摄像头清洁装置呢?
Cybercab已确认启动生产
这两次被曝的路测图,实际都传递了特斯拉Cybercab最新的测试进展。
在芝加哥加装摄像头清洁,对应的是特斯拉正在对测试车的传感器进行压力测试,以此确保在冬天或恶劣条件下,车辆也能保持正常工作。
而在奥斯汀取消后视镜,则是在验证FSD平台整体,包括车型的空气动力学性能,以及没有后视镜的软件运行表现等。

实际上近几个月,已经有越来越多人感知到Cybercab测试车的出现。
从去年10月首次在加州上路,到现在近4个月时间,Cybercab已经在美国五个州进行过测试。并且在过去几周,测试速度正明显加快。
去年年底也有无人机拍到,特斯拉工厂内停放着十多辆Cybercab,看样子已经进行过碰撞测试,部分车辆有明显的损坏痕迹,还有车辆弹出了安全气囊。

这些进展无一不在传递一个重要信息:Cybercab已进入最终验证阶段。
在2025年的最后一天,特斯拉发布了2025年度回顾视频。其中就提到了Cybercab,确认已正式启动生产。
这意味着,特斯拉筹备多年的Robotaxi终极形态,或许今年终于可以如期进入量产。在去年的股东大会上,马斯克把这个时间点定在了今年4月。
另外,Cybercab之所以受到外界的广泛关注,一方面是由于它是特斯拉推动Robotaxi发展的核心载体,另一方面也因为Cybercab会运用“Unboxed”(开箱)制造工艺。

这种工艺与传统汽车生产线大相径庭,它会把汽车拆分成若干大模块,在不同区域同步进行组装,最终如同“拼乐高”一般整合起来。其优势在于能够大幅压缩生产周期,有效降低成本。
马斯克曾形容,这种产线将来的速度之快,运转时甚至没法让人员靠近。
电动汽车分析师索耶·梅瑞特(Sawyer Merritt)预测,采用这种生产方式,一辆Cybercab或许仅需10秒就能完成下线流程,相比之下Model Y需要34秒,未来的最终目标是将时间缩短至5秒左右。

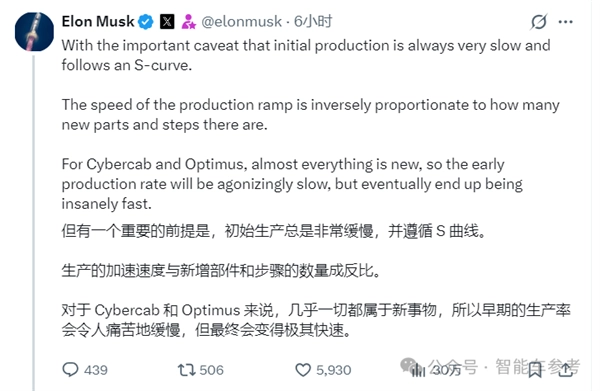
不过马斯克在评论区的回应,倒是难得措辞谨慎一回,坦言初期的生产速度会非常缓慢。
毕竟对于Cybercab和机器人Optimus来说,一切几乎都要从零开始磨合,但最终生产速度会变得极快——这一特点也契合产品生命周期里非常典型的S曲线。
那马斯克认为,这一全新产线能有多快呢?刚刚提到的两大产品,显然已经被马斯克寄予厚望。按照他之前的预测:
Cybercab的目标是年产200万辆,将是特斯拉有史以来产量最高的车型;
Optimus更不必说,马斯克甚至认为未来规模远超汽车,今年就能把产能提高到大约5万~10万台。
用硅谷知名天使投资人——杰森·卡拉卡尼斯(Jason Calacanis)最近的预言来说:
“我敢断言,大家未来只会记得,特斯拉制造了10亿台Optimus机器人。”
“没人会记得,特斯拉以前造过汽车。”
One More Thing
但也不是所有人都在憧憬,或者说看好特斯拉的宏伟愿景。
起码Waymo前CEO,约翰·克拉夫奇克(John Krafcik)就不这么认为。本质上,他还是对特斯拉的纯视觉路线非常质疑。
所以CES 2026期间,他言辞犀利地指出了特斯拉传感器套件的局限性:
人眼的视觉能力,远远超过一辆装有七个500万像素摄像头的汽车,并且这些摄像头里仅有一个是标准焦距,剩下的全是广角摄像头。这种500万像素的排布形式,其实使得车辆的实际有效视觉能力大概只有20/60或者20/70的水平。在这样的配置条件下,车上其他的摄像头甚至连车管所的视力检测都没办法通过。

他认为,激光雷达和雷达路线,提供了完全不同的主动感知方式,与摄像头提供的被动感知形成互补。
而特斯拉移除这类传感器,就等于束缚了自己的AI,只能在噪点更多,可靠性也更低的数据流里训练——
“就像患有严重近视、需要戴眼镜一样,(特斯拉)只能依靠极其有限的数据周期运行。”